Ocean services provider DeepOcean has successfully mobilized its first Autonomous Inspection Drone (AID), which can unlock substantial cost savings for operators of offshore wind farms and oil and gas fields.
The AID has been mobilized on board the Edda Fauna subsea Inspection, Maintenance and Repair (IMR) and Remotely Operated Vehicle (ROV) support vessel. In the coming months DeepOcean will conduct offshore trials for utilizing the AID under one of DeepOcean’s annual inspection campaign for an operator on the Norwegian continental shelf.
“A rapidly growing amount of subsea infrastructure is placed on the seabed within both the offshore renewables and oil and gas industries. This equipment needs to be inspected regularly. We have developed the AID to increase efficiency and accuracy when collecting inspection data. It has the potential to substantially reduce the cost, time and environmental footprint that is normally associated with subsea inspection work,” says Craig Cameron, Technology Manager at DeepOcean.
Next chapter for subsea inspection
Today, subsea infrastructure is typically inspected by ROVs that are launched from multipurpose vessels and controlled by ROV operators on board. Some companies, such as DeepOcean, have developed remote operations capabilities, which allow the company to control the ROV from an onshore-based Remote Operations Centre (ROC), thereby reducing operating costs, emissions, and HSE risk.
Automation of parts of the subsea inspection scope, using an AID, is an obvious next step for the offshore industry. Examples of inspection scopes, which are likely to be automated in the near-term future, include external and internal production templates, jacket structures, and flexible risers.
In the offshore renewables sector, it is even more attractive to automate the regular inspection of subsea structures as hundreds of similar structures are installed on a single field development with very similar inspection requirements.
“The AID can perform pre-programmed inspections of all subsea assets. This means that significant value can be created for operators of offshore energy assets when the same inspection scope can be repeated year on year,” adds Craig Cameron.
Digital twin enabler
A key enabler for the ability to perform programmed, autonomous inspection work is the creation of digital twins of subsea infrastructure.
DeepOcean has developed a digital twin platform where a model of an AID is controlled. This technology allows inspection engineers to virtually plan and simulate the route for the inspection scope. The inspection plan is then exported to the AID from the ROC. Subsequently, the AID can autonomously execute the planned route, while an operator simultaneously oversees the operation from the ROC. The inspection data from the AID and the position of the vehicle is continuously being streamed back into the digital twin to ensure high data quality and increase situational awareness for the operator.
Mobilized at Edda Fauna
The AID project is a strategic partnership between DeepOcean, Argus Remote systems and Vaarst where a system of systems has been developed with industry guidance, support and funding from AkerBP to bring a platform to market and could potentially disrupt the way subsea inspections are conducted.
The first AID has recently been mobilized on board the Edda Fauna subsea IMR and ROV support vessel, which is on long term charter to DeepOcean.
Remota AS, the joint venture between DeepOcean, Solstad Offshore and Østensjø Group, is enabling offshore operations to be performed from onshore though digitalised control systems. Deepocean is running the AID from the Remota control centre.
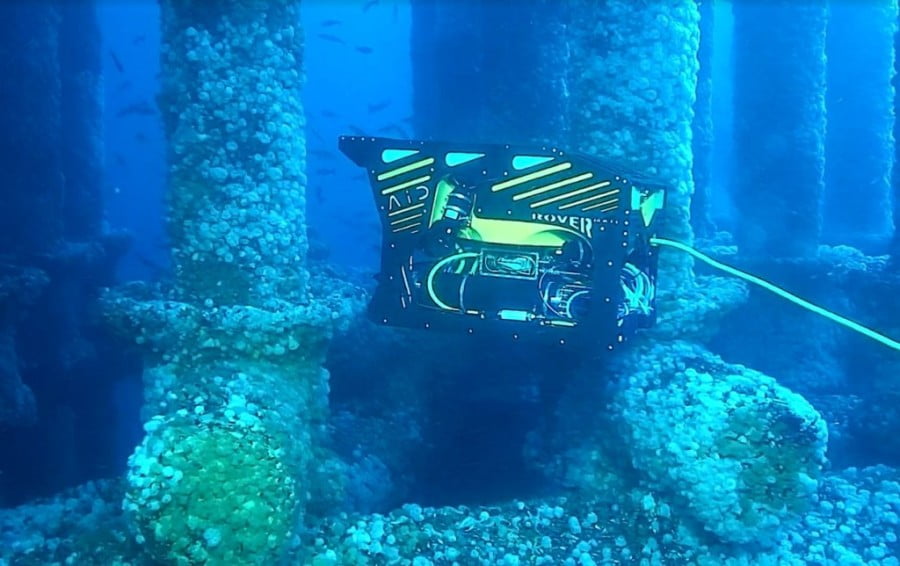
The AID is based on a Rover MK2 ROV from Argus Remote Systems, with upgraded hardware and software packages. Argus is responsible for AID platform and navigation algorithm. DeepOcean is responsible for the digital twin platform, mission planner software and live view of the AID in operation, while Vaarst is responsible for machine vision camera “Subslam 2x” for autonomous navigation and data collection.
The AID measures 1.25 x 0.85 x 0.77 meters and weighs 320 kilograms in air and can operate in water depths down to 3,000 meters.
The inertial navigation system selected from Sonardyne is the Sprint Navigator mini 4K. Live imaging sonar with obstacle tracking and avoidance is from the Norbit WBMS FLS.
“We look forward to proving that the AID allows autonomous surveys to be carried out, enabling us to collect data in a smarter way, and gain better support for comparisons and changes over time on subsea equipment. Irrespective of the AID launch platform, we believe that the combination of AID and digital twins for subsea inspection work can save operators of offshore assets a substantial amount of time and money,” concludes Craig Cameron.